
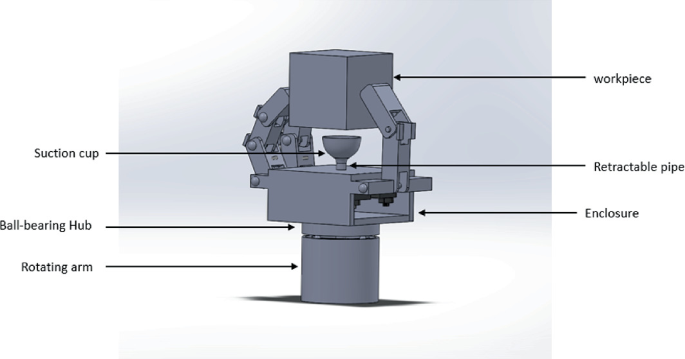
An L-shaped pipe is grasped by a three-fingered gripper with point
4.9
(680)
Write Review
More
$ 7.00
In stock
Description

Compliant Grasping Using Astriction
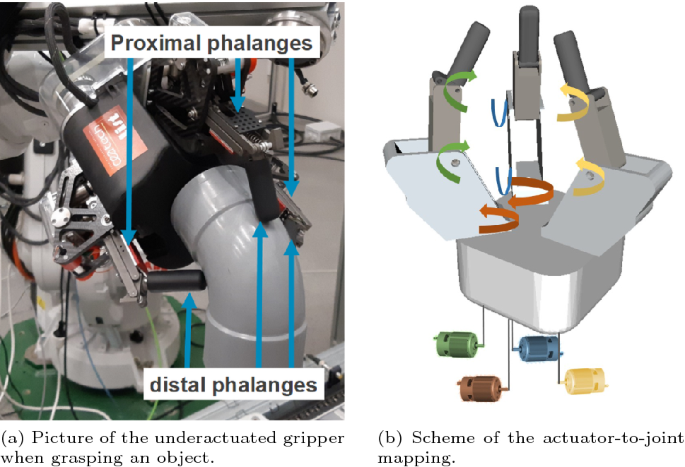
Grasp space exploration method for an underactuated gripper using human initiated primitive grasps

Why Use a Robot Gripper with 3 Fingers?
Grasping Force Analysis of 3-Fingered Gripper
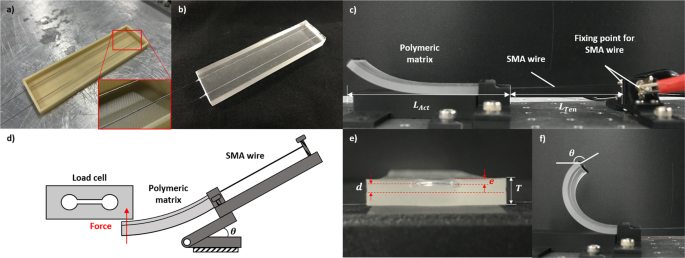
Long Shape Memory Alloy Tendon-based Soft Robotic Actuators and Implementation as a Soft Gripper

Design and Grasping Force Modeling for a Soft Robotic Gripper with Multi-stem Twining
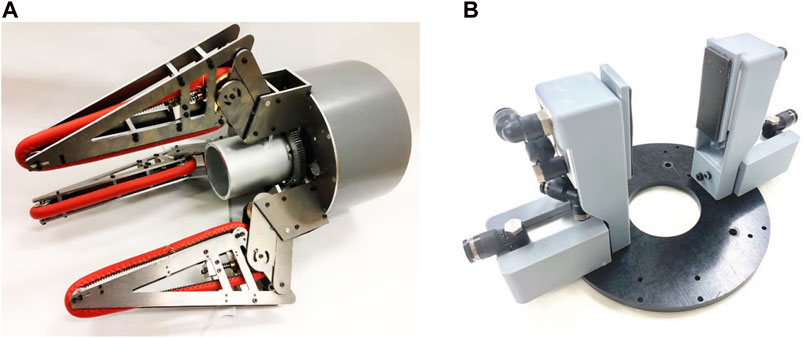
Frontiers Sensor-Less and Control-Less Underactuated Grippers With Pull-In Mechanisms for Grasping Various Objects
Biomimetics, Free Full-Text

grasping pattern Archives - The OT Toolbox

PDF] Robust sensor-based grasp primitive for a three-finger robot hand

Inventions, Free Full-Text
Three-Finger Robotic Gripper for Irregular-Shaped Objects
Related products





You may also like




